Two Y_min stops and homing the extruder
Hi all,
I asked the same question in the Marlin forum. But I found out that it is sometimes easier for me to mod the repetier firmware than marlin. As I understand, repetier also runs on Arduino Mega + RAMPS1.4 so I'm going to post the same question here. I did some research but strangely couldn't find anyone with the same problem as me. So here goes..:
Currently I'm working on a project that involves two Y motors. It's basically a gantry like this: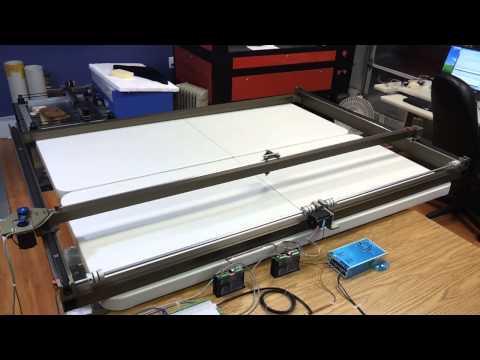 with two Y motors instead of the coupler + linear rod setup. I made the gantry relatively flexible to protect the system from overdetermination (I am a mechanical engineer after all). I want to use the Y slot for the left motor and the E1 slot for the right motor, this shouldn't be too hard I think. The pain is in the homing. Since the gantry is quite flexible it may get disaligned when the motors are disabled. Therefore I mounted two endstops, one left, one right. My homing procedure will be as follows:
with two Y motors instead of the coupler + linear rod setup. I made the gantry relatively flexible to protect the system from overdetermination (I am a mechanical engineer after all). I want to use the Y slot for the left motor and the E1 slot for the right motor, this shouldn't be too hard I think. The pain is in the homing. Since the gantry is quite flexible it may get disaligned when the motors are disabled. Therefore I mounted two endstops, one left, one right. My homing procedure will be as follows:
I'm thinking of using the Y_min slot for the left motor and Y_max for the right motor. How would I go about implementing this procedure in the firmware?
Also, I'm building this kind of extruder: https://www.thingiverse.com/thing:31210, it will function as a vacuum pump of sorts. I'm building mine a little different but you get the idea. On boot the machine doesn't know what volume the syringe is holding, so I want to home it as well, probably using the Z_max slot. I asked a group of engineers about this but none of them thought it was possible without heavily modding the firmware. Is there a way?
I don't mind dirty workarounds as long as they work.
I asked the same question in the Marlin forum. But I found out that it is sometimes easier for me to mod the repetier firmware than marlin. As I understand, repetier also runs on Arduino Mega + RAMPS1.4 so I'm going to post the same question here. I did some research but strangely couldn't find anyone with the same problem as me. So here goes..:
Currently I'm working on a project that involves two Y motors. It's basically a gantry like this:
with two Y motors instead of the coupler + linear rod setup. I made the gantry relatively flexible to protect the system from overdetermination (I am a mechanical engineer after all). I want to use the Y slot for the left motor and the E1 slot for the right motor, this shouldn't be too hard I think. The pain is in the homing. Since the gantry is quite flexible it may get disaligned when the motors are disabled. Therefore I mounted two endstops, one left, one right. My homing procedure will be as follows:- Home the gantry in Y using both motors until either one endstop is hit.
- Home the gantry using only the motor whose endstop was not hit yet.
I'm thinking of using the Y_min slot for the left motor and Y_max for the right motor. How would I go about implementing this procedure in the firmware?
Also, I'm building this kind of extruder: https://www.thingiverse.com/thing:31210, it will function as a vacuum pump of sorts. I'm building mine a little different but you get the idea. On boot the machine doesn't know what volume the syringe is holding, so I want to home it as well, probably using the Z_max slot. I asked a group of engineers about this but none of them thought it was possible without heavily modding the firmware. Is there a way?
I don't mind dirty workarounds as long as they work.
Comments